宁波材料所在机器人高效标定理论方面取得进展
利用微分几何中李代数与李群的指数映射关系,引入指数坐标来描述刚体瞬时运动与有限运动的关系,具有形式简洁、物理意义明显的优点。以此建立指数积公式来描述链式机构的运动学,相比传统基于D-H参数的运动学建模方法,能够避免运动学误差模型奇异,提高参数辨识的鲁棒性。但现有运动学建模大都采用齐次变换矩阵来描述刚体的位姿,存在着数据结构条目过多、运算量大等问题。此外,矩阵的二维数据结构与计算机内存格式不一致,执行代码过程需要反复进行数据的拆解拼接,计算耗时长。因此,采用新型数据结构,提高机器人面向复杂作业轨迹的标定与编程效率势在必行。
中国科学院宁波材料技术与工程研究所精密驱动与智能机器人技术团队提出了一种以单位对偶四元数(UDQ)为数据结构的局部指数积公式误差建模与补偿方法,有效提高了机器人运动学标定的效率。该方法首先将传统复数扩充为带三个正交虚数单位的四元数,并进一步引入对偶算子,得到能描述刚体位姿的八维UDQ(如图1所示),与4×4的齐次变换矩阵相比,显著减少了条目数量。通过定义UDQ指数与对数映射的显式法则,实现了刚体有限与瞬时运动的高效计算;并定义了基于UDQ伴随映射的显式法则,为揭示运动学误差在链式机构中的传播与累积规律奠定了基础;从而建立了基于UDQ的指数积公式,形成了面向串联机器人的运动学标定方法。通过分析与定量评估,论证了基于UDQ的标定模型相比传统基于齐次变换矩阵的标定模型,能有效降低标定过程的算术计算次数;此外,由于UDQ是一种基于向量的数据结构,避免了在程序执行过程中对数据进行拆解与拼接,进一步提高了误差补偿过程的解算效率。仿真与实验验证了该方法对如图2所示的不同构型的串联机器人,在误差补偿过程中能节省25%~30%不等的计算时间(如图3所示),这对于实现机器人的高效运动学标定与编程具有重要意义。
本项目相关的科研成果以“Efficient Kinematic Calibration for Articulated Robot Based on Unit Dual Quaternion”为题,发表在IEEE Transactions on Industrial Informatics(《IEEE工业信息学汇刊》)上(DOI:10.1109/TII.2023.3254666)。以上工作得到了国家自然科学基金(U20A20282、U22A20177和U1813223)、浙江省“领雁”攻关计划项目(2022C01114)和中科院国际合作项目(174433KYSB20210060)等项目的资助。
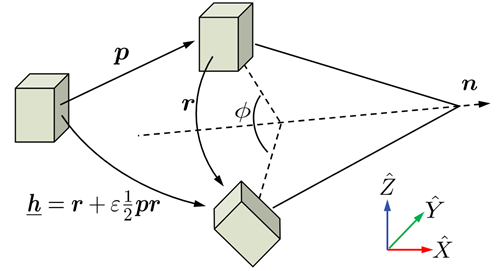
图1 描述刚体位姿的UDQ
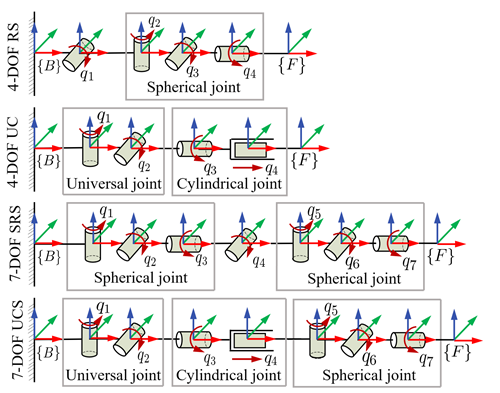
图2 四种串联机器人结构简图
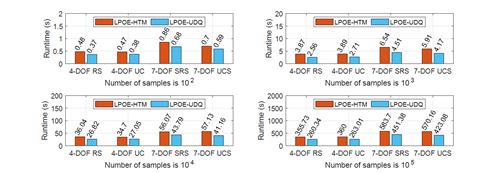
图3 四种串联机器人误差补偿的计算时间对比
(先进制造所 陈思鲁)